SPEKTRUM™ MS6X™
HANGING IN THE BALANCE
Radio control model motorcycles have been available for over three decades. However, they have never been popular due to poor and inaccurate controllability. In other words, they crashed. A lot. More recent examples included mechanical geometry and an onboard flywheel mounted in the rear wheel or in the frame, but most RC enthusiasts who tried these RC motorcycles experienced constant crashing.
Horizon Hobby pioneered RC stability systems. Innovations such as AS3X® (Artificial Stabilization – 3-aXis) and SAFE® (Sensor Assisted Flight Envelope) for aircraft and AVC® (Active Vehicle Control®) for surface vehicles revolutionized the industry. These patented Spektrum™ technologies make learning to fly RC simple and significantly improve the handling characteristics of surface vehicles.
The goal was to create a stabilization system for a motorcycle. The solution was MS6X™ (Motorcycle Stabilization – 6-aXis). Designed to work behind the scenes, an MS6X System delivers instantaneous corrections regarding banking, self-leveling, wheelie control, and more, with a natural feel and wholly accurate commands.
You can find this patent-pending Spektrum™ technology in the Losi® Promoto-MX™ RTR Motorcycle.While it took significant programming efforts to account for the unique dynamics of motorcycles, we soon had an RC model motorcycle that drove amazingly well on multiple surfaces such as pavement, dirt, gravel, and grass. The early proof-of-concept models of the future Promoto-MX amazed first-time drivers and experienced enthusiasts with its precision and ease of operation and development has culminated in this striking innovation to the radio control market.
ANGLE DEMAND
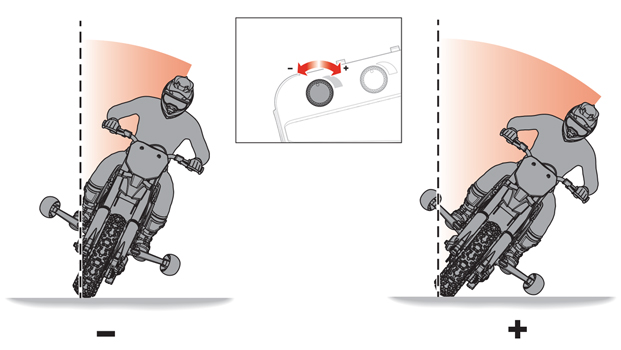
Unique to our stability system, the driver controls the lean angle and not the steering position. A steering input from the transmitter equates to a specific lean angle, and the stability system manipulates the steering angle to achieve this demanded bank angle. Lean angle data is updated many hundred times per second, providing seamless control. The system attempts to maintain the commanded lean angle regardless of the motorcycle’s speed or outside influences like surfaces that are not flat or rough. This advanced function is a primary key to accurate controllability. An onboard IMU (Inertial Measurement Unit) combined with a proprietary attitude estimator provides real-time precise data on roll and pitch angles. The onboard stability system knows exactly the angular roll, pitch, and yaw position of the motorcycle at all times. This data is then processed, and corrective steering inputs are generated.

LEAN ANGLE ENVELOPE
The maximum bank angle (right and left) is programmed in the stability system. This prevents the motorcycle from over-leaning and crashing even at low speeds. The onboard IMU and Attitude Estimator accurately determines the real-time lean angle and provides steering input that prevents exceeding the programmed bank angle threshold regardless of speed. Note that on slick surfaces, it’s advantageous to further limit the Lean Angle Envelope to prevent the tires from losing traction.
SELF-LEVEL
The current assortment of available motorcycles poorly track straight. They are highly affected by uneven, side angle surfaces, bumps, and even the wind. Maintaining a straight line requires constant correction by the driver.
MS6X stability system utilizes an IMU/Attitude Estimator, and the driver commands the roll angle while the stability system manipulates the steering angle to maintain that commanded angle. When the steering input is centered or released the motorcycle maintains a straight track regardless of outside influences like uneven, side angle surfaces or bumps. This feature is key to controllability, especially on dirt. Simply center the steering on the transmitter and the motorcycle will track straight regardless of outside influences.
That means the MS6X system can keep a motorcycle upright and ready on practically any dirt track, which is exactly what you want to do with a Promoto-MX—race around a track and hit some jumps.

YAW STABILITY (RATE) GAIN
During testing proof-of-concept models, it was found that adding a rate gyro to the Yaw axis significantly enhances the handling, driving precision, and performance of the motorcycle. The Yaw axis is stabilized with a rate gyro (monitors and corrects rotation rate) such that when the rear of the motorcycle slides, opposite steering input is given. The Yaw Axis is stabilized by the gyro only in the IMU.

WHEELIE CONTROL
Motorcycles inherently have a high center of gravity, and one of the challenges discovered with the proof-of-concept model was under hard acceleration, the motorcycle would immediately pop a wheelie and flip over backward. Utilizing the IMU data, our engineers developed an algorithm by using real-time pitch angle data and established thresholds for a pitch angle and rate of angular pitch change.
What that created was in situations when either of the thresholds is exceeded, the throttle output is automatically reduced, or brakes are applied to prevent flip-overs. Through extended testing, it was discovered the threshold could be adjusted that would allow an extended wheelie of several hundred feet simply by holding full throttle from a standing start.
Popping a wheelie has never been more fun or easy.

AUTO CRASH RECOVERY
One of the primary reasons that current and previous generation RC motorcycles have never really caught on is the fact they fall over and crash far too often and are difficult to control. In the event of a crash, it’s then necessary to retrieve the motorcycle, stand it back up, and push start while applying the throttle to recover. Many drivers found they were recovering the motorcycle from a crash as much as they were driving. Furthermore, to start the motorcycle it’s necessary to have someone hold the bike upright and give it a push while the driver applies throttle to get going.
Coming to a stop or driving very slowly will cause the motorcycle to fall. An important function that was developed is that the motorcycle can recover from a fall on its own. Auto Crash Recovery combines the stability system with Nerf bars. When crashed, the driver simply releases the steering and hits the throttle. The bars will immediately stand the motorcycle upright and it can be driven off.
When crashed, the motorcycle maintains about a 45-degree angle via the lean bars. Additionally, the IMU/stability system knows the system is crashed and which side it’s laying on. With the steering input centered, the stability system drives the steering angle in the appropriate direction and amount to recover. Three points of contact (the lean bar, the rear tire, and front tire) occur, and by applying the throttle the motorcycle will stand up and can be driven away without the need to manually retrieve the motorcycle.
This system also makes starting the motorcycle simple as the driver can lay the bike down on the track, go up on the driver’s stand, and then get the bike started by simply hitting the throttle.

